Simple Control, Good Performance
Simple Control, Good Performance
What is the simplest feedback controller? Likely a controller with static gain 1? It cannot get any simpler than that. What kind of performance can this unity gain controller provide? A textbook example shows such a simple controller can provide good performance. The example appears in Multivariable Feedback Control by Sigurd Skogestad and Ian Postlethwaite (Example 2.12), where a unity static feedback loop demonstrates remarkable effectiveness in mitigating disturbances in a flexible structure.
The Problem: Resonant Oscillations in Flexible Structures
Flexible structures, such as mechanical systems with lightweight components or high-speed robotic arms, are prone to resonant oscillations. These oscillations arise due to the system’s natural frequencies, where small disturbances can excite sustained vibrations. Consider a system with an open-loop transfer function G(s)=2.5s(s²+1)/(s²+0.25)/(s²+4) with its Bode plot shown here.
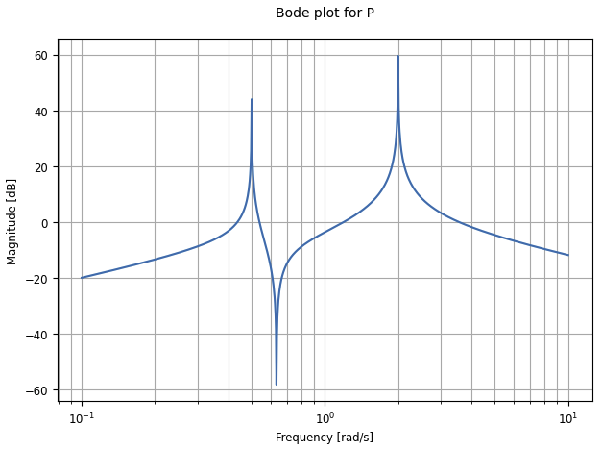
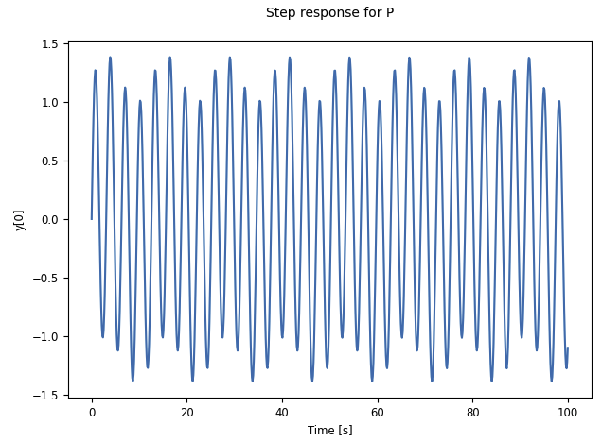
Clearly, it exhibits two resonant peaks in its Bode plot. At these frequencies, the system’s gain is high, amplifying disturbances and leading to persistent oscillations in the step response, as shown here.
The objective is to design a feedback controller that suppresses these disturbances while maintaining stability.
The Surprising Solution: Unity Static Feedback
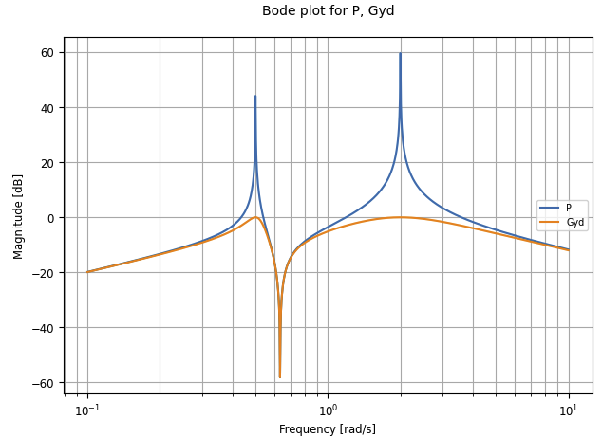
The textbook example proposes a surprisingly simple solution: a unity static feedback controller, which applies a fixed gain of 1 to the system’s output. Despite its simplicity, this controller dramatically reduces the effect of disturbances. Here is a comparison between the open-loop and closed-loop Bode plots.
Here is the step response plot of the closed-loop response with the unity feedback controller.
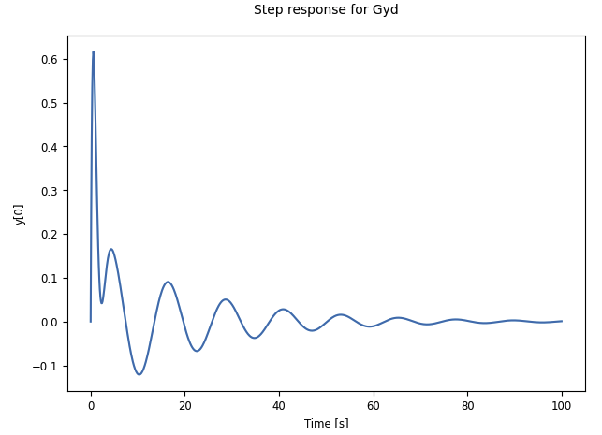
In the closed-loop response, the disturbance is attenuated within 10 seconds and to nearly zero within 60 seconds, eliminating the sustained oscillations observed in the open-loop case.
This outcome defies intuition. One might expect a more sophisticated controller—such as one with integral action or dynamic compensation—to achieve such performance. However, the unity static feedback loop leverages the fundamental principle of feedback to reduce sensitivity to disturbances by reshaping the system’s closed-loop frequency response. Specifically, the controller lowers the sensitivity function’s magnitude at the resonant frequencies, effectively dampening the oscillations without requiring complex tuning.
The Trade-Offs of Integration: Faster but Less Robust
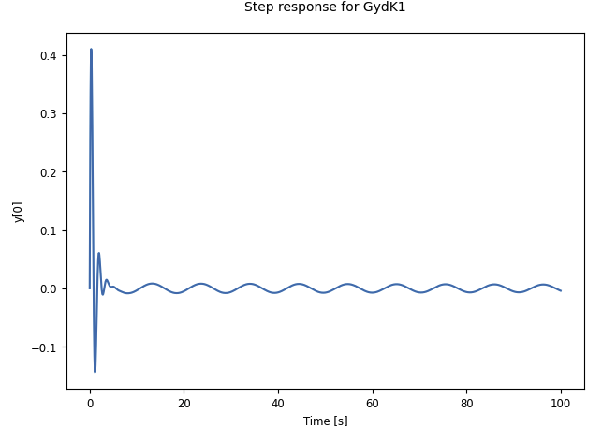
To explore alternatives, the unity static feedback controller was compared to a controller incorporating integral action K₁=(s+5)/s. While the integrated controller reduced the disturbance more quickly, it introduced small oscillations in the steady-state response. Here is the closed-loop step response when using K₁.
The Bode plot of the sensitivity function revealed a key trade-off: the integrated controller reduced the gain at low frequencies (improving disturbance rejection) but amplified the gain at certain resonant frequencies, creating new peaks in the sensitivity function. Here is the comparison of the sensitivity function between the unity feedback controller and K₁.
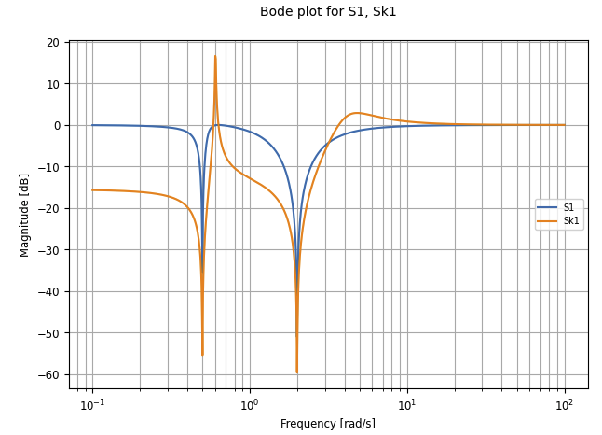
This phenomenon is explained by Bode’s sensitivity integral. When a controller reduces the sensitivity function’s magnitude in one frequency range (e.g., low frequencies), it must increase it in another (e.g., high frequencies), creating trade-offs that limit performance. The integrated controller’s attempt to suppress low-frequency disturbances inadvertently exacerbated resonant peaks, highlighting the inherent difficulty in simultaneously minimizing all sources of sensitivity.
Lessons from the Example
This case study offers three key takeaways:
-
Simplicity Can Outperform Complexity: A unity static feedback controller, despite its lack of tuning parameters, can achieve robust disturbance rejection by exploiting the fundamental properties of feedback. This underscores the importance of understanding the system’s dynamics and the role of the sensitivity function.
-
Bode’s Sensitivity Integral as a Design Limitation: The trade-off between low- and high-frequency performance is not arbitrary—it is a mathematical inevitability. Controllers must navigate these constraints to avoid unintended resonances or instability.
-
The Role of Robustness: While integrated controllers can improve transient performance, they may sacrifice robustness by amplifying sensitivity at other frequencies. The unity static feedback controller, though slower, provides a more balanced and stable solution.
Conclusion
In the realm of control systems, the design of effective feedback controllers often involves intricate trade-offs between performance, stability, and robustness. The example from Multivariable Feedback Control serves as a powerful reminder that control design is as much an art as it is a science. By carefully analyzing the Bode plot, sensitivity function, and the limitations imposed by Bode’s integral, engineers can make informed decisions about controller complexity and performance trade-offs. In this case, the unity static feedback controller demonstrates that sometimes, the simplest solution is the most effective—one that quietly leverages the elegance of feedback to tame even the most stubborn resonant oscillations.